Blog Page
Modernizing MLOps at understand.ai with ClearML

At understand.ai, we develop ML-based software to automate data labeling. Our work involves building and maintaining numerous models, which require regular updates and fine-tuning to meet our customers' specific needs. Optimizing our ML operations directly enhances the …
Read moreHow to Elevate Autonomous Systems for Industrial Sites: Embotech Case Study

In today's evolving industrial landscape, Embotech is a leading provider of AI software for autonomous systems. Headquartered in Zurich, Switzerland, Embotech's solutions enhance safety, productivity, and energy efficiency in logistics yards, ports, and smart factories …
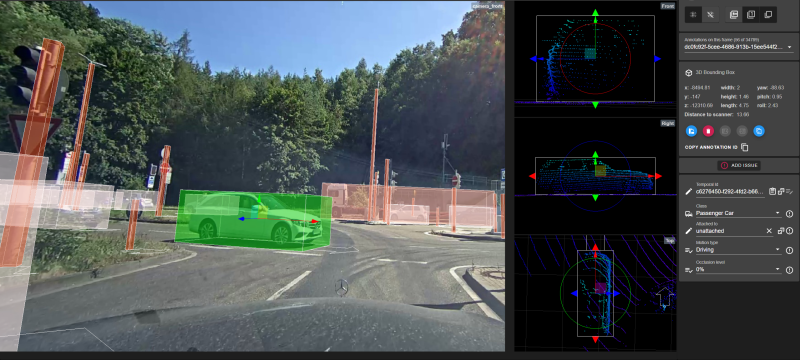
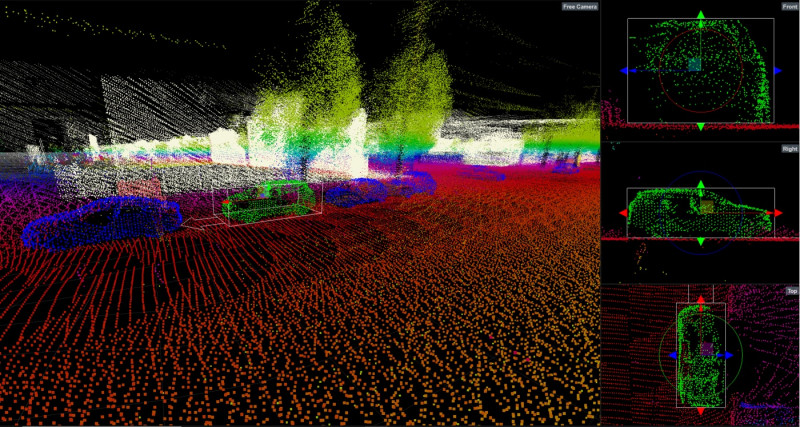
Read moreNew tooling for multi-sensor labeling

What Prompted the Need for Updated Labeling Tooling? Modern vehicles can be equipped with a variety of different sensors for assistance systems or autonomous driving. Common examples are cameras, RADAR and LIDAR sensors and many more. While some assistance functions such as an …
Read moreAll articles
Autonomous Driving: Synthetic Data versus Real Data
By Simon Romanski · Feb 08, 2024 6 minutes read
Significance of Ground Truth Labels in Machine Learning
By UAI Staff · Feb 01, 2024 3 minutes read

Workshop for the AVEAS Project. Latest developments and key results
By Dr. Janina Stompe · Jan 23, 2024 3 minutes read

Enabling ADAS Validation Scale with Automated Annotation. A case study
By Chester Harding · Jan 16, 2024 5 minutes read